
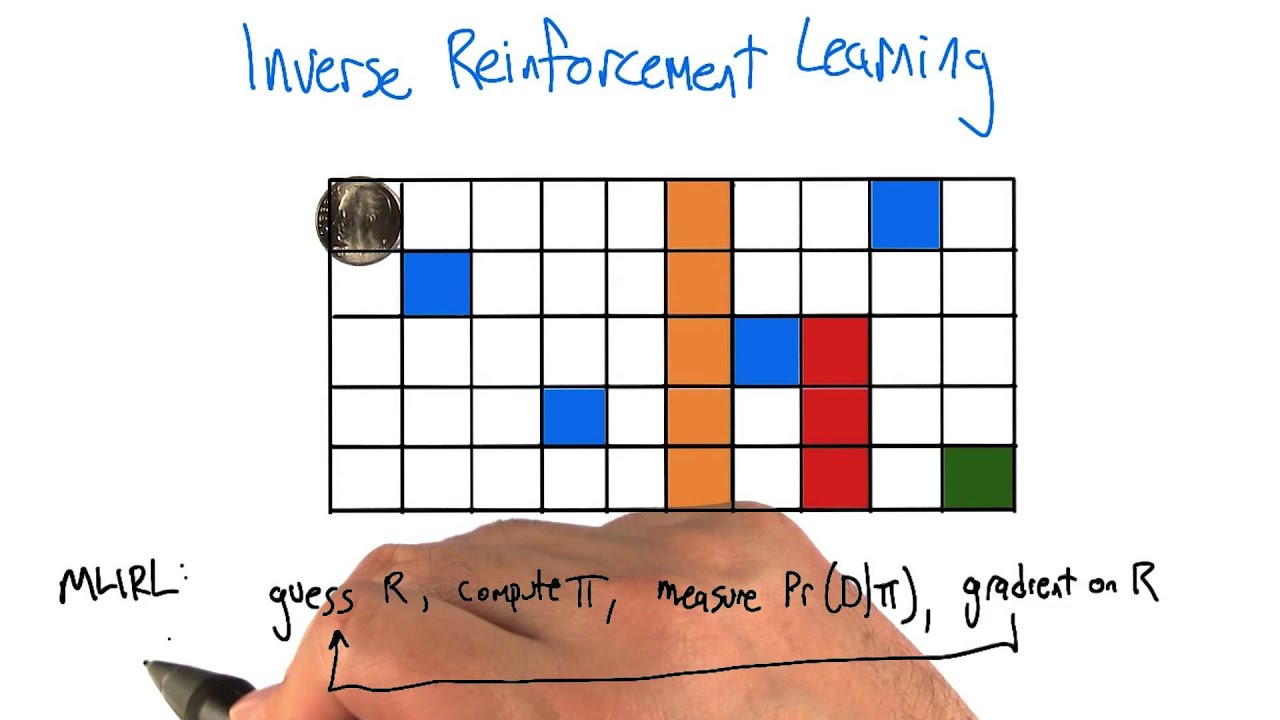
O Aprendizado por Reforço Inverso (IRL) é um tipo de técnica de aprendizado de máquina em que os agentes aprendem a imitar o comportamento de um professor, inferindo a função de recompensa subjacente que governa o comportamento do professor. A IRL é frequentemente usada para aprender comportamentos complexos em robótica e inteligência artificial, permitindo ao professor fornecer feedback na forma de recompensa sem nunca programar explicitamente a função de recompensa no sistema.
A IRL está intimamente relacionada à aprendizagem por reforço, um tipo de aprendizagem em que recompensas são fornecidas ao agente por atingir um determinado objetivo ou resultado. Na aprendizagem por reforço, a função de recompensa é explicitamente programada no sistema. Porém, na IRL, a função de recompensa é inferida a partir do comportamento do professor. Assim, no processo de aprendizagem da função recompensa, o agente deve imitar o comportamento do professor.
A aprendizagem por reforço inverso tem sido usada em diversas áreas de aplicação. Por exemplo, tem sido usado para aprender comportamentos de robôs em ambientes simulados e do mundo real, para desenvolver várias estratégias de jogo e habilidades de jogo, e para permitir que os sistemas planejem automaticamente suas atividades ou tarefas. Além disso, tem sido usado em inteligência artificial, processamento de linguagem natural, navegação e direção autônoma.
No geral, a aprendizagem por reforço inverso fornece uma ferramenta incrivelmente poderosa para aprender comportamentos complexos e dinâmicos. É uma ferramenta poderosa em ciência da computação, robótica e outras áreas para aprender a partir de comportamentos observados, permitindo que os agentes imitem seus professores.